
 爱吃水果沙拉的秋天
爱吃水果沙拉的秋天
| 导读 | 进程是操作系统种调度的实体,对进程拥有资源的描述称为进程控制块(PCB, Process Contrl Block)。 |
内核里,通过 task_struct 结构体来描述一个进程,称为进程描述符 (process descriptor),它保存着支撑一个进程正常运行的所有信息。task_struct 结构体内容太多,这里只列出部分成员变量,感兴趣的读者可以去源码 include/linux/sched.h头文件查看。
struct?task_struct?{
?
#ifdef?CONFIG_THREAD_INFO_IN_TASK
??/*
???*?For?reasons?of?header?soup?(see?current_thread_info()),?this
???*?must?be?the?first?element?of?task_struct.
???*/
??struct?thread_info????????thread_info;
#endif
??volatile?long?state;
??void?*stack;
??......
??struct?mm_struct?*mm;
??......
??pid_t?pid;
??......
??struct?task_struct?*parent;
??......
??char?comm[TASK_COMM_LEN];
??......
??struct?files_struct?*files;
??......
??struct?signal_struct?*signal;
}
task_struct 中的主要信息分类:
1.标示符:描述本进程的唯一标识符 pid,用来区别其他进程。
2.状态:任务状态,退出代码,退出信号等
3.优先级:相对于其他进程的优先级
4.程序计数器:程序中即将被执行的下一条指令的地址
5.内存指针:包括程序代码和进程相关数据的指针,还有和其他进程共享的内存块的指针
6.上下文数据:进程执行时处理器的寄存器中的数据
7.I/O状态信息:包括显示的I/O请求,分配的进程I/O设备和进程使用的文件列表
8.记账信息:可能包括处理器时间总和,使用的时钟总和,时间限制,记帐号等
- struct thread_info thread_info: 进程被调度执行的信息
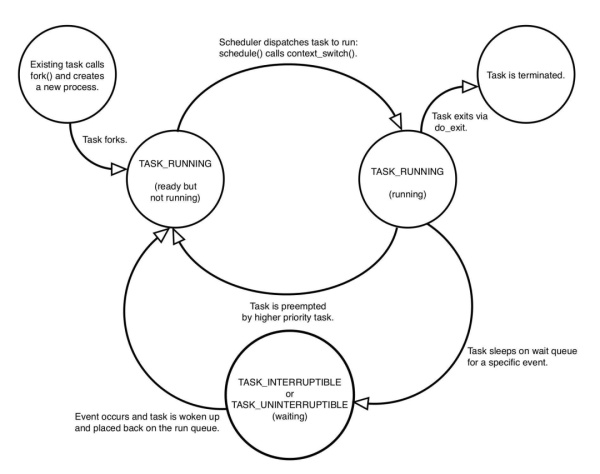
- volatile long state:-1是不运行的,=0是运行状态,>0是停止状态。下面是几个比较重要的进程状态以及它们之间的转换流程。
- 鸿蒙官方战略合作共建——HarmonyOS技术社区
- void *stack:指向内核栈的指针,内核通过 dup_task_struct 为每个进程都分配内核栈空间,并记录在此。
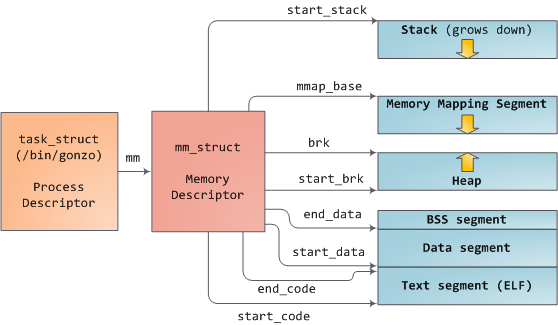
- struct mm_struct *mm: 与进程地址空间相关的信息。
- pid_t pid: 进程标识符
- char comm[TASK_COMM_LEN]: 进程的名称
- struct files_struct *files: 打开的文件表
- struct signal_struct *signal: 信号处理相关
接着看下 thread_info 结构:
struct?thread_info?{
????????unsigned?long???????????flags;??????????/*?low?level?flags?*/
????????mm_segment_t????????????addr_limit;?????/*?address?limit?*/
#ifdef?CONFIG_ARM64_SW_TTBR0_PAN
????????u64?????????????????????ttbr0;??????????/*?saved?TTBR0_EL1?*/
#endif
????????union?{
????????????????u64?????????????preempt_count;??/*?0?=>?preemptible,?<0?=>?bug?*/
????????????????struct?{
#ifdef?CONFIG_CPU_BIG_ENDIAN
????????????????????????u32?????need_resched;
????????????????????????u32?????count;
#else
????????????????????????u32?????count;
????????????????????????u32?????need_resched;
#endif
????????????????}?preempt;
????????};
#ifdef?CONFIG_SHADOW_CALL_STACK
????????void????????????????????*scs_base;
????????void????????????????????*scs_sp;
#endif
};
接着再来看下内核栈的定义:
union?thread_union?{
#ifndef?CONFIG_ARCH_TASK_STRUCT_ON_STACK
????????struct?task_struct?task;
#endif
#ifndef?CONFIG_THREAD_INFO_IN_TASK
????????struct?thread_info?thread_info;
#endif
????????unsigned?long?stack[THREAD_SIZE/sizeof(long)];
};
当 CONFIG_THREAD_INFO_IN_TASK 这个配置打开的时候,则 thread_union 结构中只存在 stask 成员了。
内核在启动的时候会在 head.S 里通过 __primary_switched 来做内核栈的初始化:
SYM_FUNC_START_LOCAL(__primary_switched) ????????adrp????x4,?init_thread_union ????????add?????sp,?x4,?#THREAD_SIZE ????????adr_l???x5,?init_task ????????msr?????sp_el0,?x5??????????????????????//?Save?thread_info
将 init_thread_union 的地址保存到 x4,然后偏移 THREAD_SIZE 栈大小,用于初始化 sp。将 init_task 进程描述符地址赋值给 x5,并保存到 sp_el0。
下面再看下 init_thread_union 和 init_task 的定义:
#include/linux/sched/task.h
extern?union?thread_union?init_thread_union;
?
#init/init_task.c
struct?task_struct?init_task
????????__aligned(L1_CACHE_BYTES)
=?{
#ifdef?CONFIG_THREAD_INFO_IN_TASK
????????.thread_info????=?INIT_THREAD_INFO(init_task),
????????.stack_refcount?=?REFCOUNT_INIT(1),
#endif
.....
?};
故这三者的关系可以通过下图描述:
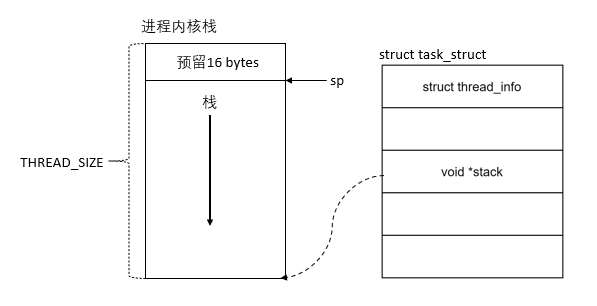
内核中经常通过 current 宏来获得当前进程对应的 struct task_sturct 结构,我们借助 current,结合上面介绍的内容,看下具体的实现。
static?__always_inline?struct?task_struct?*get_current(void)
{
????unsigned?long?sp_el0;
?
????asm?("mrs?%0,?sp_el0"?:?"=r"?(sp_el0));
?
????return?(struct?task_struct?*)sp_el0;
}
?
#define?current?get_current()
代码比较简单,可以看出通过读取用户空间栈指针寄存器 sp_el0 的值,然后将此值强转成 task_struct 结构就可以获得当前进程。(sp_el0 里存放的是 init_task,即 thread_info 地址,thread_info 又是在 task_sturct 的开始处,从而找到当前进程。)
