
 嗫?暁雲?
嗫?暁雲?
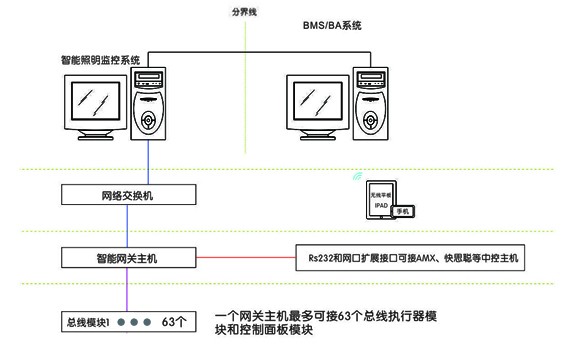
智能照明控制系统,可以采用ETRON-NET总线控制架构。各个控制区域设一个智能网关主机,智能控制网关主机具有TCP/IP接口,接入区域网络交换机。整个智能照明控制系统的PC控制软件提供OPC接口,方便与智能建筑其他子系统进行对接。
如上图所示:在该系统中总线模块(4/8/12路智能智能照明模块,2路智能照明调光模块,6键智能按键面板等)有弱电通讯线以及强电线材,一般来说,强电线直接穿管布线到控制电箱,强电接线到控制模块上面,弱电线一端接模块的入线,一端接模块的出线。如下图所示:

智能照明控制模块之间的连接方式,可使用弱电四芯线连接或者使用翊创智能总线连接片连接使用如下图所示:

以下是一套完整的智能照明控制系统的架构图:

怎样利用家用电脑控制步进电机?
可以采用专用的步进电机驱动器。
具体方法:
电脑只需向驱动器输出两个信号:脉冲和调向信号。脉冲信号的频率控制步进电机的转速,脉冲的个数控制步进电机的转角;调向信号控制步进电机的转向。步进电机驱动器的型号很多,例如MS-2H057M。如果是控制微型步进电机,可以采用SMD-401型驱动器,65元一个。
北汽新能源EU5的电机控制系统有哪些亮点技术?
北汽新能源EU5搭载了EMD3.0智能电控包含的电机控制系统,具有优化动力、调校动能、提升能量回收效率等功能,使整车能效更高、续航更长。它具备如下五大亮点技术:
1.主动阻尼控制:当整车出现抖动时,控制系统通过扭矩控制算法检测转速,智能识别异常波动并适时介入,对整车抖动进行抑制,从而提高驾乘的舒适性,减少驾乘人员在加减速时因抖动造成的不适感。
2.矢量控制:通过全温度范围内的高精度标定,合理分配电机的励磁电流和扭矩电流,一是使扭矩精度提高;二是使低速输出扭矩增大,加速性能好;三是使车辆控制更精准更灵活。提升了驾乘人员对动力的极致追求。
3.高扭矩响应速度:电机系统的扭矩响应仅受限于算法控制的电流上升速度,故应速度远高于发动机的扭矩响应速度,在任何工况下,从零扭矩到最大扭矩响应速度小于100ms,可以让整车的动力输出随叫随到。
4.扭矩安全控制:采用集中式控制的三层软件安全架构,电机控制系统通过扭矩估算算法,实时监控扭矩命令和输出扭矩的一致性,确保整车的动力需求,防止非预期扭矩的出现,保证了驾乘人员的人身安全。
5. 低噪音:电控系统软件采用硬件参数调校,软件扫频控制,并配以专家团队的主观评价,大幅降低整车电磁噪音,提供安静舒适的驾乘体验。
电动车控制器是外挂的好还是内挂的好
内挂。
外挂的容易掉掉了就麻烦了。
电动车控制器原理及功能

电动车控制器的基本原理是在电池电压基本恒定的条件下,采用断续供电的方法,改变电机供电电压的平均值,来控制电机速度、电流的大小。使得电机的运转符合控制要求,目前主要采取的控制方法是PWM脉宽调制控制机理,即:在所需的时间内,将直流电压调制成等幅不等宽的系列电压脉冲,以达到控制频率、电压、电流的目的。电动车控制器是借助PWM电路来控制电机输出功率的,实现开关调制作用的是高频开关功率器件MOS管,用它来做执行高频斩波断续供电的开关,从而有效地解决了电机的速度和电流的操控性。随着电动车应用的发展,对控制器功能要求越来越高,越来越多元化。
电动车中的控制器一般必须具备三大功能:
一是速度调节;
二是过电流控制;
三是欠压保护,
具体包括以下一些功能:
防飞车功能、欠压保护功能、巡航功能、助力功能、自动识别相位功能、转堵保护功能、短路保护功能、分档式行驶功能、柔性EABS刹车功能、反充电功能、零启动功能、低噪声控制功能、短路保护功能、过载保护功能等。
电动车的分类及架构

电动车的控制器按照功率来分大功率控制器、中功率控制器、小功率控制器,按照电机的类型来分类直流有刷控制器和直流无刷控制器,按照在车上的装配位置来分可以分为分离式控制器和一体式控制器。现在很大一部分电动车使用的是无刷控制器。
控制器最基本的功能是驱动控制功能,根据其功能要求最基本的架构是周边器件和主芯片(或单片机)组成。周边器件是一些功能器件,如执行、采样等,它们是电阻、传感器、桥式开关电路,以及辅助单片机或专用集成电路完成控制过程的器件;单片机也称微控制器,是在一块集成片上把存贮器、有变换信号语言的译码器、锯齿波发生器和脉宽调制功能电路以及能使开关电路功率管导通或截止、通过方波控制功率管的导通时间以控制电机转速的驱动电路、输入输出端口等集成在一起而构成的计算机芯片。
控制器性能主要影响因素控制器作为电动车的最主要的关键部件,其性能和质量直接关系到电动车的性能和质量,也关系到消费者的直接人身安全,因此对于厂家来说控制器的性能和质量尤其重要。
影响控制器质量和性能的主要因素有以下几点:
1控制器的元器件的性能和质量,控制器最主要的工作部件是单片机,目前我国采用的绝大部分的单片机(微处理器)来自于国外进口。其他的元器件、零配件我国目前基本上能够自主生产,如电感、传感器等。
2控制器的设计水平,主要是指的是总体结构设计、功率开关电路的布局、各种周边电子元器件的分布等都关系到控制器的质量。
3控制器与电机及其他功能部件的兼容程度。控制器作为电动车整车的控制中枢,直接指挥复杂采集信号的处理和各种指令的发出,因此信号采集部件和指令执行部件的性能对控制器的性能有一定的影响。
雕花机的伺服电机都要求什么控制啊,位置?速度还是什么
位置、速度是控制模式,一般伺服电机都支持几种模式;只是不了解你的雕花机有啥具体要求呢,一般根据具体要求配置电机即可,主要是扭矩的选取
对机器人的设计,制作,代码编写和调试的看法
你的问题实际上包括了两方面:设计、制作。
制作相对于设计来讲,要容易一些,因为仿造一个机器人也可以说是制作。
所需要的知识大概如下(可参照工科专业大学课程规划):
结构方面(机械专业相关):机械原理(所需机构的基本运动学、力学原理),机械设计(知道各种零件的用途、基本配合关系),基本装配方法(好多结构能设计出来,但是装不起来),工程图学(交给别人机加时,至少得会出二维图),公差计算基础(知道机加时哪些尺寸需要多高的精度),工程材料基础(了解各种常见材料的特性,复合材料方面不需要多深入,了解一些常用的复合材料就行),加工工艺基础(知道各种零件能如何加工出来,主要侧重冷加工方面)。硬件电路方面(电子专业相关):电路基本原理,模拟电路、数字电路基础(会实现基本的控制电路:电源、逻辑电路等),检测技术基础(知道常见传感器的原理、指标及使用方法)。软件方面(计算机专业相关):编程语言(C语言或一种汇编),操作系统基础(有助于设计较为复杂的软件架构,也有助于学习单片机、DSP等控制器),常用算法与数据结构(有助于设计出合理、高效、有创意的机器人控制算法),计算机网络基础(比如未来可以做多机器人通讯等),软件工程(知道如何设计并维护软件),数字图像处理基础(用到摄像头等传感器时需要这方面知识)。控制方面(自动控制专业相关):电机学(知道如何控制电机(马达)转起来),自动控制原理(让电机按照你的期望速度和目标位置转动起来,如经典的PID算法),一些信号处理知识(比如用于滤波)。数学方面(工科专业相关) :计算方法(一些用于实际计算时的算法),线性代数(或高等代数、矩阵论)用于未来需要计算多关节机器人的运动学、动力学的必备工具。会计方面(商科专业相关):成本分析、预算等概念,起码需要知道做出这个机器人要花多少钱(一般机加要占大头,画电路板是其次,自己做的话,软件开发的会计成本可以忽略)。具体到可能需要学习的技术方面,可以从以下几方面涉猎:
结构方面:学习一种三维建模工具(SolidWorks或Pro E、UG等),能出二维图;能做一些有限元分析就更好了(会帮助你设计可靠的结构)。硬件电路方面:会用一种电子设计工具(Protel、PowerPCB等),能画原理图,会画PCB;一种电路仿真工具(EDA软件:如Proteus),单片机(51、AVR、Freescale、ARM等)或CPLD/FPGA,你的驱动程序、控制算法要在上边实现。软件方面:学会一种IDE(如Keil、ICC、Realview等),了解编辑、编译、调试方法;学习一下uC/OS或其他RT OS的使用,如果要跑操作系统,可方便移植。经典控制如果要设计出自己的机器人来,恐怕需要在一定“制造”的基础之上有自己的靠谱想法,可以从多个学科深入下去,仅举几个例子:
机构:学习更多机构原理,积累更多机械设计经验;数字图像处理:目标检测、图像识别,立体视觉等;控制理论:滤波算法、系统辨识、自适应控制、模糊控制等;仿生学:好多新颖的机器人都是建立在仿生学的基础上的。此外,还可以关注国际机器人方面相关的论文(如中文的《机器人学》等)或会议(如ICRA、IROS等) ,跟踪著名高校的机器人方面研究近况(如CMU、MIT等),相信一定会开阔眼界的。
转载请注明出处51数据库 » 软件架构电机控制 智能照明控制系统的架构是怎么样的
