
 命中助腚
命中助腚
http://games.sina.com.cn/downgames/updatex/pcgames/2004/09/0179240.shtml 这是一个超级路点补丁,基本上包含了所有的地图。下载后解压到CS里的cstrike文件夹下 覆盖podbot文件就行了 可以开心的屠机器人了 吼吼!!
最好的机器人
最好的机器人是 R2 星球大战里的。多可爱
还有机械警察莫菲 半机器人
还有终结者,,这个可牛比了。
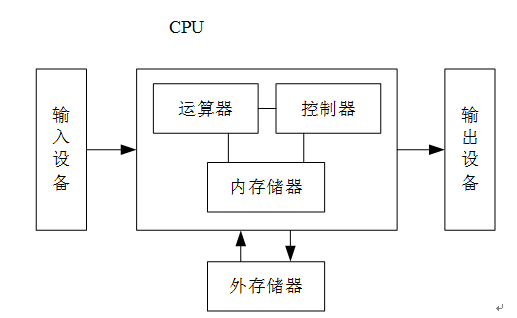
冯诺依曼机的冯 · 诺依曼机器人
克劳斯· 拉克纳尔(Klaus Lackner)是哥伦比亚大学地球工程中心的教授,很多年前,他还在洛斯阿拉莫斯国家实验室(Los Alamos National Laboratory)工作。那时他和他的朋友,威斯康星大学的粒子物理学家克里斯托弗·文特(Christopher Wendt),正在喝啤酒聊天。一个念头突然冒了出来:“怎样解决全球变暖问题?”
他们都知道,这不是一件小事。他们打算把空气中的二氧化碳转变成碳酸钙——石灰石、汉白玉、白垩,都是这种东西。从空气中提取二氧化碳然后变成固体的工作量和所需要的资源都是惊人的,不能指望有人投资或者国家拨款,所以他们只好转而寻求其他办法。
例如……一个全自动的转化过程。假设一台机器。它能够复制自身。它可以把太阳能转化为所需的电能。它可以很容易地获得制造它的原料。这样如何?
听起来很不错。机器数量将会以倍数递增,一台变成两台,两台变成四台,然后是八台、十六台。这像是一个细胞一样不停地分裂,而无穷无尽的太阳能将会让它们不停地繁殖下去,直到被制止为止。
太阳能不是问题,而一台机器所需要的原料无非是铁、铜、铝、硅、碳这样的常见元素罢了,这些东西遍地都是,只要提取出来就行。只有一个问题:怎样让机器自我复制?
这个问题曾经难倒过笛卡尔,不过我们现在已经有了答案。在20世纪40年代晚期,冯·诺依曼已经初步解决了这一问题。当时他在加利福尼亚州帕赛迪纳的海克森研讨班上做了一系列演讲,要解决的核心问题就是“机器要怎样才可以自我复制?”
冯·诺依曼认为,任何能够自我繁殖的系统,都应该同时具有两个基本功能。第一,它必须能够构建某一个组成元素和结构与自己一致的下一代;第二,它需要能够把对自身的描述传递给下一代。他把这两个部分分别叫做“通用构造器”和“描述器”,而描述器又包括了一个“通用机器”和保存在通用机器能够读取的介质上的描述信息。
这样,只要有合适的原料,通用构造器就可以根据描述器的指示,生产出下一台机器,并且把描述的信息也传递给这台新机器。随后,新机器启动,再进入下一个循环。
这种思路被几年后的一项惊人发现所验证。1953年,沃森和克里克发现DNA完全具备冯·诺依曼所提出的两个要求。而现在,我们虽然还没有设计出能够真正完全复制的机器,但是使用冯·诺依曼的思路的自我复制产品的确已经存在——电脑病毒就是其中最广为人知的一种。
克劳斯·拉克纳尔和克里斯托弗·文特打算按照冯·诺依曼的思路开展他们的工作。他们给这个项目起名叫奥克松斯(Auxons),这是从希腊语的“auxein”借过来的,意思是“成长”。他们给最初的原型机安装了高温熔炉用来获取需要的金属原料,并且打算把它扔到沙漠里面去。在那里,奥克松斯可以获得大量的原料和能量,并且不会有人来打扰。虽然没有看到概念图,但是在我的想法中,奥克松斯看起来应该跟Wall·E差不多……
然而,就现在而言,奥克松斯看起来还是有点过于精密了。它相当于将一条现代化的生产线全塞到一个小箱子里面去,用目前的技术水平来实现它,还是有些难度。不过它的创造者们还是信心十足,希望能够很快看到这种机器投入使用。想想它可能的用处吧:生产足够整个世界使用的电能、改善全球气候、甚至是改变大片区域的地貌,这些对于数亿个太阳能机器来说,完全不在话下。
这个项目并没有赢得所有人的叫好声。有人担心这种机器将会破坏沙漠地区的生态平衡,从而导致不可预测的结果。毕竟我们对于我们生活的这个星球了解得远远不够。结果会怎么样,现在还很难说。
《探索》杂志在1995年将奥克松斯评选为“能够改变世界的七个主意”之一。的确如此。无论是更好还是更坏,但是源源不断复制的机器,必将改变世界。 捷克作家卡雷尔·恰佩克在1920年写过一部科幻三幕剧,叫做《罗素姆万能机器人》。这是人们首次听到robot这个词。近90年过去了,机器人及其相关产品早已发展成一个庞大的产业。微软公司前董事长比尔·盖茨在2006年12月的《科学美国人》上撰文,声称机器人将会变成另一个像个人电脑一样普及的科技产品。
虽然比尔·盖茨做出了不少错误的预言,但是这次看起来还是比较靠谱的。家用卫生机器人已经不是什么稀罕东西了,最近还有一些企业推出了机器人厨师。小朋友们抱着会撒娇的机器恐龙,科技馆门口站着机器迎宾小姐。甚至还有人信誓旦旦地认定,到了2050年,和机器人结婚都不在话下。
实际上,能够繁殖的机器并不少见——比方说我们的工业流水线。在你看到这里的那一瞬间,世界上有大量我们看不见的机器人正在厂房里忙碌。日本是世界上工业机器人最多的国家,世界上一半的工业机器人都在日本。那些机器人和我们在卡通片中看到的不太一样——看起来只是一支机械手臂,没有表情丰富的脸和健美好看的身段。这些机器人日复一日地在生产线上焊接组装手机、电脑、以及……更多的机器人——但是同样没有自我意识。这种机器人看起来要安全得多。也许很快,我们在家里也可以这么做了。
2008年7月,在切尔滕纳姆科学节(Cheltenham Science Festival)上,英国巴斯大学的艾德里安·鲍耶(Adrian Bowyer)和新西兰科学家维克·奥利弗(Vik Oliver)公布了一个叫做“RepRap”的机器人。这台方方正正的机器看起来像一个鞋架,完全看不出我们梦想的那种机器人的影子。不过,它可以自我繁殖——虽然并不完全。
RepRap可以通过电脑的指令来制造实体的零件,然后由操作者手工装配。实际上,它的核心部件就是一个三维打印喷头,使用融化的塑料来制造零件,或者使用融化的低熔点合金来打印电路。因为并非所有的部件都可以用塑料或者这种合金来制作的,因此一些零件不得不采用其他材质。这距离我们想象的那种自我复制机器人似乎有点远。
实际上,它所使用的三维打印机并不是什么新东西。三维打印机的原理和传统喷墨打印机很像,只不过它的喷头能够在水平和垂直两个方向上移动,从而塑造出三维的形象。现在已经有了一些成熟的产品,但是价格却一直高高在上。在这方面,RepRap有优势得多。
这是由它的设计目的而决定的。RepRap是为了改善那些落后国家和地区的现状而设计的,鲍耶希望这种产品的大规模应用能够为落后国家提供一些制造业的就业机会。只需要一个RepRap和足够多的标准零件,你就可以拥有无数个。然后,你就有了一条自己的生产线。
这个项目是完全开放和免费的。任何人都可以下载相关的使用说明书,使用它制造出来的产品也不需要支付任何版税。也许过不了多久,我们就可以自己在家里生产衣架和拖鞋这种小件产品,还可以多制造几个RepRap送给其他人。
或者还有另外一种可能。2005年5月11日,康奈尔大学的科学家们展示了几块方块。这些方块每个都是10厘米见方,外表看起来一模一样。把四个方块摞在一起,它就变成了一个非常简单的机器人。它会寻找附近的方块,然后拼成一个和它一模一样的家伙。他的设计者介绍说,每一个方块中都有一块芯片,里面存储着拼装的指令,并且通过控制方块表面的电磁铁来完成各种动作。
这种机器人的前景很不错。我们可以想象由数十个或者数百个这种基本单位组成的机器人,当其中的某个单位坏掉的时候,可以很容易地替换。只要生产过程足够简单,这种机器人的成本会很低,而用途几乎是无穷无尽的。也许有一天,这种机器人会自己生产基本单位,然后一切都不用我们操心了。 想象一个很小的东西。大概有一根头发直径的7万分之一那么小。对了,那就是1纳米。1纳米是1米的10亿分之一,大概只有原子直径的10倍。在几十个到几百个纳米尺度上,人们打算制造些东西。这就是纳米技术。
1959年,诺贝尔奖获得者、物理学家费曼(《别闹了,费曼先生!》那本书说的就是这位很好玩的物理学家),曾经做过一次名为“在物质底层有大量空间”的演讲。他预言,人类将可以把分子甚至原子做为基础原料,在最微观的空间构建物质。例如,我们可以把碳原子一个一个排列成钻石。毕竟世界是由原子构成的。在理论上,纳米机器可以构建所有的物体。
费曼的预言很快成真了。1991年,IBM公司的一个研发小组在一块镍板上,通过扫描隧道显微镜用35个氙原子拼出了“IBM”的字样。随后,工程师们又制造出了几个纳米大小的齿轮、剪刀、螺旋桨这类东西,但是却一直没有找到好的马达来驱动它们。
如果打算在这样小的尺度上制造机器,工程师就需要向生物学家取经了。生物学家在这方面有所突破,他们发现生物体内存在着天然的分子马达,生物体的一切定向运动都与它有关。而不同类别的分子马达也有不同之处,有的用两条“腿”迈步前进,有的还分成了“定子”和“转子”。有了这些东西,那些纳米级的零件就可以被驱动了。
对分子马达的控制现在已经有了一些进展,用分子马达驱动纳米级别的机器很快就会成为现实。但是以现在的技术水平,生产这样的机器成本实在太高,最好的办法还是采用自我复制的方式。
纳米机器人的复制会容易一些。它们可以直接抓取合适的分子甚至是原子来构建一个新的自己,或者干脆利用DNA的自我复制的特性,从一个很快变成数十亿个。无论是速度还是成本,都是其他制造工艺望尘莫及的。这些小家伙可以在人体内工作,通过杀灭病毒、病菌来治疗疾病、通过提高供氧量来改善体质,甚至延缓衰老治疗癌症,这些都可能实现。想想看那部《垂暮之战》吧。
不过就现阶段而言,这种机器还不能指望很快出现。虽然最近这样的研究成果已经出现在学术期刊和科学杂志上,但是距离真正的应用,还有不小的距离。 伴随着新技术而来的,往往不仅仅是赞叹。可以自我复制的机器可以带来前所未有的方便,但是它可能存在的问题也是显而易见的:如果自我复制失控了呢?
2004年,有一本叫做《运动学的自我复制机器》(Kinematic Self-Replicating Machines)的书出版了。那本书的封面上是一片草原,上面挤满了兔子。这个封面像是一个警告,在提醒我们无限繁殖会导致什么样的可怕状况。
机器和兔子不同。兔子需要食物,需要排泄,需要自己的领地。当繁衍太多时,会因为生态的崩溃而大批死亡,最后重新恢复平衡。而机器不需要,当它的繁殖失去控制时,我们只能眼睁睁地看着它们吞噬所及的一切,而且每个周期都会增加一倍的数量。
对自我复制机器的担心由来已久,甚至出现了了一个专有名词“灰雾”(Gary Goo),专门用来描述世界被不停复制的纳米机器吞噬的场景。1986年,埃里克·德雷克斯勒(Eric Drexler)的《造物引擎》(Engines of Creation)一书中首先提出了这个名词,这种情形想来非常可怕,但是实际上并不太可能发生。
正如我们在每一台机器上面都安装了一个开关一样,任何一台能够复制的机器必然也有一个停止复制的控制机制。在我们体内,正常的细胞每分裂一次,线粒体的端粒就会缩短一次,当断于临界长度时,细胞就不再分裂,而会衰老死亡。计算机软件中往往也有这样的计数器程序,特别是在一些试用版软件中。同样的,对于自我复制的机器,也可以采用类似的技术来防止其无限制地复制下去。
但是,万一这种机制失效呢?万一某个头发蓬乱穿着白大褂或者梳着油光水滑发型穿着昂贵三件套西装的家伙故意释放了这种无限繁殖的机器呢?万一机器在某天突然拥有自我意识(就我个人而言,完全不怀疑这一天的到来),变成了天网,甚或将我们的世界变成了The Matrix呢?这些依然是未知数。我们只能寄希望于科学家们的才智,姑且认为每当这个世界面临崩溃的边缘的时候,他们有能力将这个世界重新拉回正轨。
科学家们并没有去回避危险,是因为他们相信能够控制他们的造物。说起来,人类的整个发展史,不也是走过了一条类似的道路吗?
本文转载于科学松鼠会,有所改动。
igm机器人
所谓igm机器人,一般指6轴机器人本体,夹持重量为6KG;另外,还应包括一套控制系统和焊接系统(焊接电源、焊枪及水冷系统、焊接软件系统等)。其它:起始点寻找、焊缝跟踪等,需要特殊订货。为完成一项弧焊机器人工程,除需要弧焊机器人以外,还需要实用的周边设备。弧焊机器人与周边设备组成的系统,称弧焊机器人集成系统。
周边设备的设计依据是上机焊接的工件,由于焊件的差异很大,需要的周边设备的差异也就很大,繁简不一。从焊件的焊接要求分析,周边设备的用途大致可分为三种类型。
其一,简易型,周边设备仅用来支持机器人本体和装夹焊件,如:C型架、平台以及夹具等。
其二, 工位变换型, 该型除具有上述功能外,还具有工位变换功能。其周边设备除具有上述装置外,还可能包括单、双回转和倾翻%回转式变位机等;
其三, 协调焊接型, 该型除具有上述功能外,还具有协调焊接功能。其周边设备除具有上述设备外,还可能包括一个或多个做成外部轴的变位机、龙门架及滑板、地轨及滑板等。
弧焊机器人是成熟、标准、批量生产的高科技产品,价格不贵。但设计一项弧焊机器人集成系统,
其上述周边设备是非标准的。这些设备需要专业设计和非标产品制造,其价格是比较昂贵的。
在结构件生产上,企业的竞争一方面要装备弧焊机器人,提高产品质量;另一方面要减少设备投资,降低产品成本。这是企业家考虑的事。
另外,从技术方面考虑,购置机器人不能脱离企业技术现状。采用机器人焊接的前道工序,下料精度,组对精度都有严格要求。如果达不到要求,就会导致机器人应用失败。尤其是复杂焊件,问题更比较突出。
笔者从现实技术和优化投资的角度综合考虑,提出了发展、装备经济型弧焊机器人集成系统的思路。这种思路于九十年代在某合资企业已经成功应用。
1 工程机械行业弧焊机器人集成系统装备及应用情况
工程机械行业是国民经济支柱产业之一,始建于1961年。在六、七十年代,工程机械分为八大类。自“七五”以后,随着国民经济、国防建设的发展, 给工程机械提供了较大的发展空间,产品品种、产量均有大幅度增长。中国工程机械工业协会把工程机械扩展到18类122组产品,形成了18个协会分支,会员单位约1000个生产厂家。本文所讨论的问题仅涉及到工程机械行业的主要企业,即:挖掘机械、装载机、推土机和工程起重机等生产厂家。在“八五”期间,由部委专项经费支持,一些装载机、推土机厂家装备了焊接机器人集成系统和柔性生产线。
1.1 机器人集成系统装备和应用的基本情况
据笔者不完全统计,拥有弧焊机器人集成系统的厂家约20余家。其中,装载机行业大约9家,推土机行业5家, 工程起重机行业大约3家,挖掘机行业大约5家。其中,包括多条弧焊机器人柔性生产线。这些弧焊机器人集成系统,全部是进口的。包括:igm、cloos等厂家的产品。设备购置费用很高,一个焊接单400-500万元;一条柔性生产线1500-3000万元。昂贵的设备投资,应用情况基本为不理想。相比之下,一些外资企业,要么没有装备焊接机器人;要么装备的焊接机器人,应用效果很好。
应用的具体情况如下:
(1)几条焊接机器人柔性生产线,全部不能实现设计功能。较好的生产线,做单机使用;应用比较差的生产线,差到千余万元的设备,一次没有应用;
(2)弧焊机器人单机也没有达到设计要求。使用较好的,
可焊率达到设计要求的40-50%,或20-30%应用差的,差到几百万元的设备没有应用;
(3)笔者见到应用机器人焊接较好的例子,大都用在焊缝简单的焊件上。如挖掘机动臂中段、斗杆、履带架、中间架环缝;装载机桥壳、动臂;推土机台车架(履带架)等。在焊缝分布复杂的中厚板焊件焊接上,采用机器人焊接,尚未看到应用较好的例子。如装载机的前车架,大约可焊率仅能达不到20%-50%,需要二次上变位机焊接
1.2 焊接机器人应用效果不良的原因
首先,在工艺设计中,对设备选型没有深入研究,以为机器人是“万能”的。选择的焊件,焊缝分布复杂,机器人难以适应。一个焊件,几十道甚至百道焊道,即使机器人具有起始点寻找和跟踪功能,由于待焊焊道的偏差,机器人在完成焊接20%-30%,多者40%-50%焊接以后,夹持的焊枪就可能偏离焊道了。有这样的一个设计,要求用一条机器人柔性焊接生产线,完成推土机几个大焊件的焊接,这几乎是不可能的。
其次,焊坯制造精度低。焊接的前序,存在两个问题:一是下料精度低,达不到要求;二是组对(焊坯的拼装、点焊)设备精度低。由于切割下料的热变形,焊件的板坯误差较大。下道工序又在低精度的搭焊模(拼点机或焊胎)
上组对、制坯。这样, 生产的焊坯, 其待焊焊缝的“互换”性很差,满足不了示教精度要求。笔者目睹,某主梁6条主要待焊焊道的间隙,大小相差约10mm之多。进口的机器人,就在车间里,没法使用。
2 经济型弧焊机器人及其应用
2.1 经济型弧焊机器人集成系统
所谓经济型弧焊机器人集成系统是价格便宜的系统。如果一个焊接工作单元,由一台焊接机器人和一台或两台焊接变位机组成,价格在百万之内,这个价格是非经济型机器人系统的1/3-1/5,可称经济型系统。主要用在焊缝分布简单,焊接工作量大,焊接劳动强度大、焊接环境恶劣的工件。
一般焊接机器人要求周边设备的传动精度偏高,如要求变位机传动精度1米直径,容差±0.15(±1’)。而普通的回转支承,1米直径的径向跳动量, 超过0.3mm普通减速机的传动间隙也达不到要求。
这些要求是可以放宽的,我们用普通电机、减速机和回转支承作成的变位机, 与机器人组成的集成系统已经在外资公司服役七年, 仍在正常工作。证明这种经济型的设备是实用的。
2.2 典型应用实例
2.2.1 倾翻回转式变位机-机器人自动焊接系统
这个系统由倾翻回转调速式变位机、焊接机器人和plc 集中控制系统等组成,如图1所示。变位机的两套传动系统,工作台回转加编码器,倾翻工位变换,采用行程开关。这套系统的控制,由两套控制系统组成,除焊接机器人控制系统外,还另做一套变位机的PLC控制系统。在作业过程中,两控制系统信息交换,协调工作。
变位机的功能有二,其一, 工位变换,工作台的工位为0°、45° 、90°; 其二,回转传动为交流变频调速系统,满足环焊缝焊接速度要求, 焊接过程可无人操作。主要控制过程,见图2。
这个系统也可以做成焊接专机系统(变位机1操作机)。如果专机系统没有焊枪跟踪、摆动,焊接过程需要人工时实监控、跟踪。机器人系统解决了专机不能解决的全部问题。
2.2.2 双坐单回转式变位机-机器人自动焊接系统
这个系统由变位机、焊接机器人及落地滑板(外部轴)等组成。变位机为单回转式,回转传动加编码器。变位机的功能为回转定8个工位。变位机不参与协调焊接。这套变位机-焊接机器人系统,如图3所示。
配焊接机器人的工位变换变位机,有立式和卧式两类产品,工位数可有2、4、8等。基本原理与上述产品大致相同。8工位的变位机,机器人发给变位机的转角指令为3bit信号, 由000、001、011、100、101、110、111构成八种工作状态。
这个用普通电机、减速机、编码器做成的工位变换系统很多。根据配套的焊接机器人不同和工件不同,设计的细节也不同。对薄板焊接件,不能跟踪,其工位定位还可加气动销。对中厚板焊件的工位定位,不需要那么严格,传动到位即可。如, 挖掘机履带架、斗杆、动臂中段焊接等,均获得成功。
3 关于装备焊接机器人集成系统的思考
(1) 支持发展经济型焊接机器人集成系统。在工程机械结构件生产中,总体工艺水平外资高于内资企业。外资企业的焊接机器人装备情况,不如内资企业(大、中型)装备率高。但某外资企业采用了经济型焊接机器人集成系统,比较经济、合理,这是值得借鉴的经验。
(2)合理选择应用对象。应当选择焊接工作量大,焊缝分布简单(如,长直、圆周环焊缝等)的工件,作为机器人焊接工件。就目前的工业水平而言,普通数控切割下料,普通的装焊工艺,装备焊接机器人柔性生产线是不实际的。在我国,迄今为止,弧焊机器人系统,购置不少。用在中厚板复杂焊件焊接上,尚无成功范例。复杂焊件或焊缝分布复杂的焊件,大量采用变位机焊接是合理的。
(3)焊接机器人应用是一个系统工程。结构件焊接水平应与下料、组对等生产工艺水平同步提高。某外资企业,板材下料已经采用多台激光切割机;
组对采用高精度“搭焊模”-拼点机。也有不少企业,已经采用水等离子和精细等离子下料。
(4)周边设备的高精度要求有待研究。标准机器人有着广泛的用途,不仅仅用在焊接上。而焊接机器人的周边设备就是用在焊接上。周边设备的精度要求应与焊件和焊缝的精度要求相匹配。按着这种思路,周边设备的制造精度可以适当降低要求,降低造价。而且,实践证明是可行的。
焊接机器人的应用,与产品批量、劳动力成本、劳动保护及工件质量要求有关。进入中国的外资企业,按中国劳动力成本计算,一些企业并没有装备弧焊机器人。某些企业采用焊接机器人,也是用在简单、量大的焊件上,采用了“经济型焊接机器人集成系统”。这些经验,不仅值得工程机械行业的厂家借鉴,其它行业的厂家也可以参考。
万能驱动
http://download.pcpop.com/Soft/36248.html
EBOT是一种能为用户自动搜索指定信息的搜索工具,许多人也亲切地称呼该搜索工具叫电子机器人,该搜索工具能够轻松地帮助用户搜寻并下载各类电脑驱动程序和升级程序!
是个能做在桌面上的“机器人”,能告诉你最新软件、补丁发布消息,并能将你机器里的软件查找出最新的更新版本 ☆汉化补丁使用: 本软件需要安装。安装后在 c:\ 根目录下会生成一些图片文件(*.cpn),且它的安装是在 c:\windows\DownloadWizard 目录下。解开汉化压缩包,把汉化文件 DownloadWizard.exe 复制到 c:\windows\DownloadWizard 直接覆盖原文件即可。并把注册表文件 ebot.reg 双击添加到注册表中。此时已成功完全汉化。
网友好:在手机下载电脑版软件就是万能钥匙能下载电脑软件吗?
如果用手机(WIFI万能钥匙)可以也蹭网的话我有一个小窍门,可以让电脑也连上。
步骤一:先让手机(WIFI万能钥匙)连上你所要蹭的网
步骤二:在将手机数据线连上电脑(不需要启动USB接口,也就是只让电脑给手机充电)
步骤三:在安卓手机里的找到 无线和网络设置-更多无线连接-网络共享-USB共享网络。
步骤四:现在你的电脑就可以借用手机的网络上网了
我现在就是这样用的~
PSP 有万能下载器吗?
是多玩论坛上的 http://bbs.duowan.com/viewthread.php?tid=13370191&extra=&page=1
转载请注明出处51数据库 » 万能机器人软件下载 CS万能机器人
